
Carte de pilotage d’un seul moteur pas à pas
Au lieu d’utiliser une carte de
pilotage prévue pour 3 moteurs pas-à-pas ou plus pour un projet ne nécessitant
qu’un seul, il est préférable de disposer de cartes pilotant un seul moteur. A
cet effet je me suis attaqué à la carte décrite à la 1ère page de ce blog pour améliorer sa fabrication : au lieu d’utiliser des fils, j’ai
confectionné des circuits imprimés en utilisant le logiciel (gratuit) TCI4 dont
le concepteur à encourager mérite des remerciements, et une technique basée sur
le thermo-transfert du typon sur la plaque bakélite ou époxy (simple ou double
face). Plus tard, je décrirai mon expérience concernant cette technique qui
existe sur le Net.
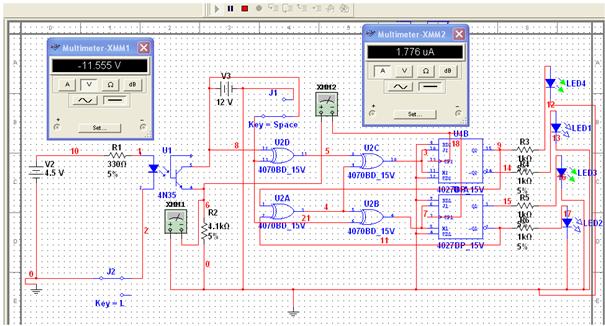
Le schéma décrit dans mon blog a
subi quelques modifications et a été testé sur le logiciel Multisim en
remplaçant le moteur pas-à-pas par des Leds afin de visualiser facilement le
changement des états de sortie en fonction des impulsions envoyées via
l’interrupteur jouant le rôle du port parallèle placé en amont de
l’opto-coupleur 4N35.
Remarque :
pour mon cas, un pas du moteur est déclenché après avoir envoyé un état bas
suivi d’un état haut.
Les séquences envoyées au moteur
sont dans l’ordre :
1001, 1010, 0110 et 0101 (Nous
sommes là en mode pas entier.)
Ces différentes séquences sont
illustrées par les photos suivantes (remarquer l’état des Leds)
 |
Multisim : Moteur
pas-à-pas - séquence 1001
|
 |
Multisim : Moteur
pas-à-pas - séquence 1010
|
 |
Multisim : Moteur
pas-à-pas - séquence 0110
|
 |
Multisim : Moteur
pas-à-pas - séquence 0101
|
La carte de pilotage du moteur, montée
sur circuit imprimé, exclut l’alimentation logique et celle du moteur pas-à-pas
mais prévoit des borniers à vis facilitant leur raccordement à la carte ainsi
que le raccordement de celle-ci à la carte d’interface fournissant l’horloge et
la direction.
 |
| Carte de pilotage d'un moteur pas-à-pas |
Test réel de la carte.
En ce qui me concerne, il s’agit
de la partie la plus intéressante. Pour cela j’ai développé (toujours en VB6) une
interface pour tester ma carte (rotation du moteur dans les deux sens) et
d’optimiser l’application informatique de pilotage des moteurs pas-à-pas pour
atteindre une vitesse importante de rotation de mes moteurs sans décrochage ni
saut de pas.
Voici l’interface logicielle :
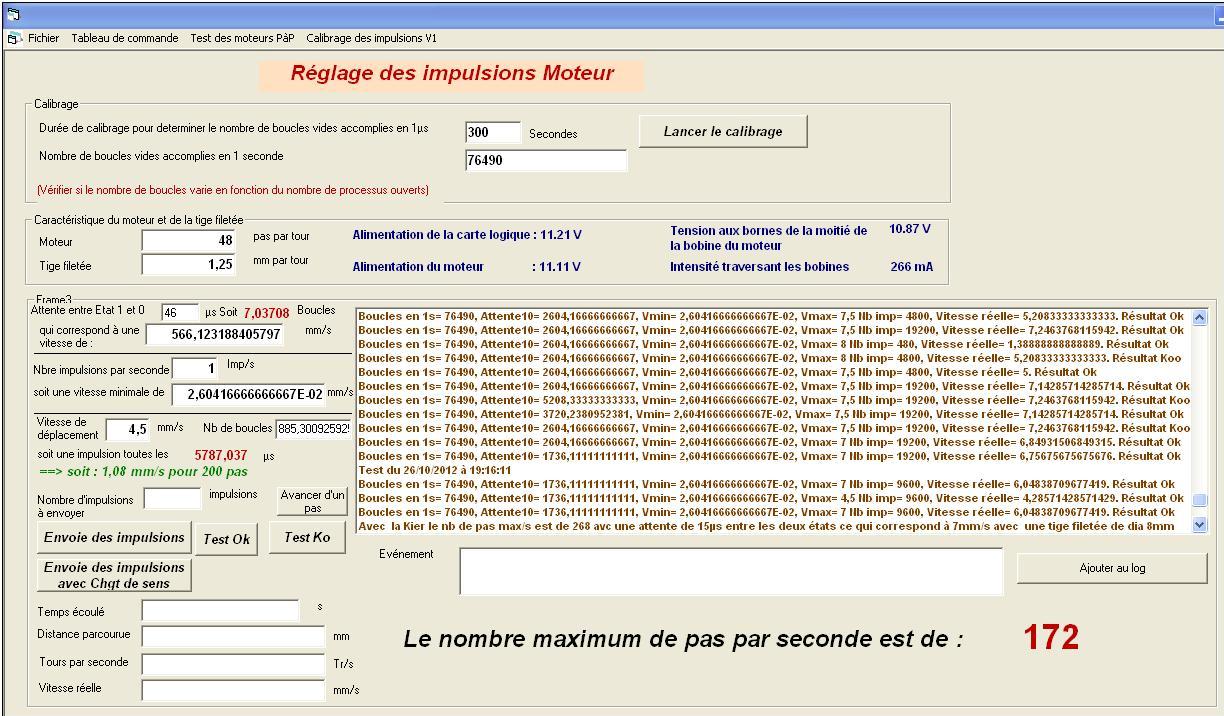 |
| Interface logicielle - Calibrage des impulsions du moteur pas-à-pas |
Chaque changement des paramètres
et mémorisé dans le journal-log pour
revenir éventuellement aux réglages
précédents en cas de décrochage ou de saut de pas.
Pour surveiller de près les sauts
de pas, j’ai inséré dans l’axe du moteur une aiguille placée devant un cadran
et en envoyant à chaque fois un multiple du nombre de pas correspondant à un
tour complet du moteur.
 |
| Moteur pas-à-pas et son cadran |
Résultats des tests :
-
Avec ma carte : 172
pas/s
-
Avec la CNC3AX : 268
pas/s
Ces vitesses
ont été atteintes en introduisant dans mon application le mode d’accélération
et de décélération du moteur au lieu de l’attaquer directement avec la vitesse
maximum ou de l’arrêter brusquement.
Conclusions :
Disposant de
la carte CNC3AX, la vitesse de 268 pas/s me parait faible. Que faut-il donc
incriminer ? Bien sûr mon
application informatique et peut être aussi les opto-coupleurs et les circuits
intégrés utilisés !!! Mais cette
vitesse et largement suffisante pour d’autres projets qui seront décrits plus
tard qui n nécessitent pas une vitesse importante, et la vitesse de 172 pas/s offerte par ma carte me satisfait pour l'instant. Mais l’optimisation de l’application
informatique demeure à faire.
Enfin, après
avoir réussi la confection du PCB de la carte de pilotage du moteur j’ai
réalisé par la même occasion celle de l’interface du port parallèle dont voici
une photo :
 |
| Carte d interface du port parallèle |
(Vos idées pour augmenter la vitesse des moteurs pas-à-pas seront les bienvenues.)
Bonjour,
RépondreSupprimerPour la vitesse des moteur pas à pas il y a une limitation due a windows, ils ne travail pas en temps réel et limite les operations à auteur de 1 à 2 millisecondes. J'ai eu le même problème, j'utilise un vieux PC avec Linux et EMC2 pour piloter les CN... Pour débloquer la vitesse de windows il y a des composants payants il me semble mais c'est pas stable (je travail sur laser et exploser une tête à 50 K€ sur une erreure fatal de windows ça fais tout drôle).
bonjour,
RépondreSupprimerconscient de la limite de windows qui est due à son timer, en effet il ne descend pas en dessous de 10 ms, mon application informatique n'utilise pas le timer de windows mais une boucle presque vide parametrée pour me fournir des intervalles allant jusqu'aux quelques microsecondes.
pour augmenter la vitesse des moteurs sans perte de pas, j'aurai utilisé des transistors de puissance darlington style TIP121 ou carrément un mosfet canal N de type IRF540 ( ou équivalent). L'avantage des IRF540 et qu'ils possèdent en interne la diode de protection dite de "roue libre") et qu'ils sont hyper rapides.
RépondreSupprimermerci de nous voir informer
RépondreSupprimermais ou en peut trouver le pilotage pres a utiliser